Our Robot
Drivetrain
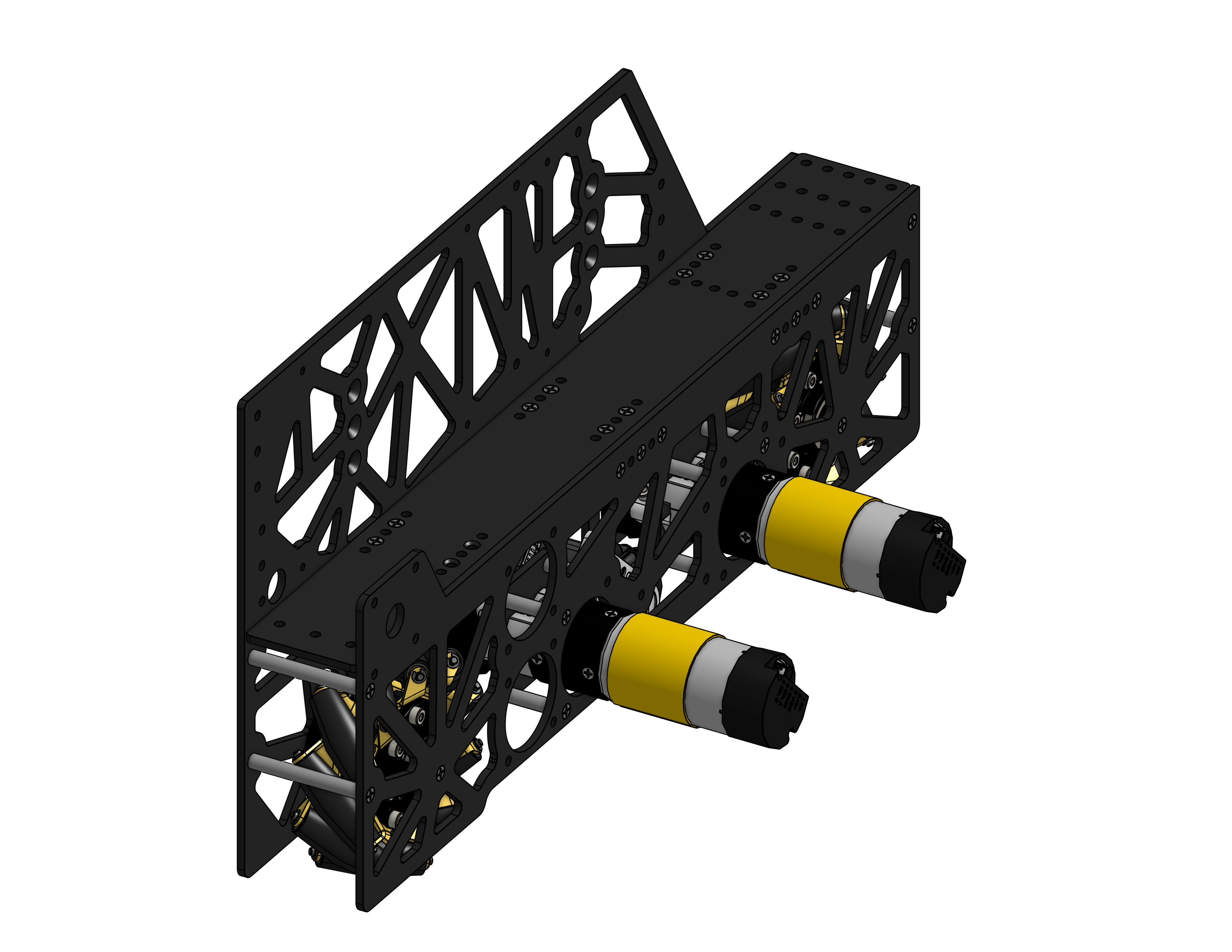
Our mecanum drivetrain uses one motor per wheel, powered through a belt and pulley system. This setup secures the motors to the drivetrain walls while maximizing space for other components like the intake. To ensure accuracy, our odometry is spring-loaded, keeping constant ground contact. We utilize a dead axle design, where the axle remains stationary as the wheels spin around it, reducing failure points. A 14.4:1 gear ratio balances speed and precision. A U-channel between the plates reinforces the structure while also serving as a mount for our camera and intake, enhancing both stability and functionality.
Intake
Claw
The passive claw is thin enough to give enough clearance for the driver; even larger errors in intake angle can easily be corrected by this claw. Even with just a pitching intake, this claw alone can pick up most samples with some drivetrain correction. The thin profile of the claw gives enough space to mount a camera as well, in order to auto-align the claw.
Differential
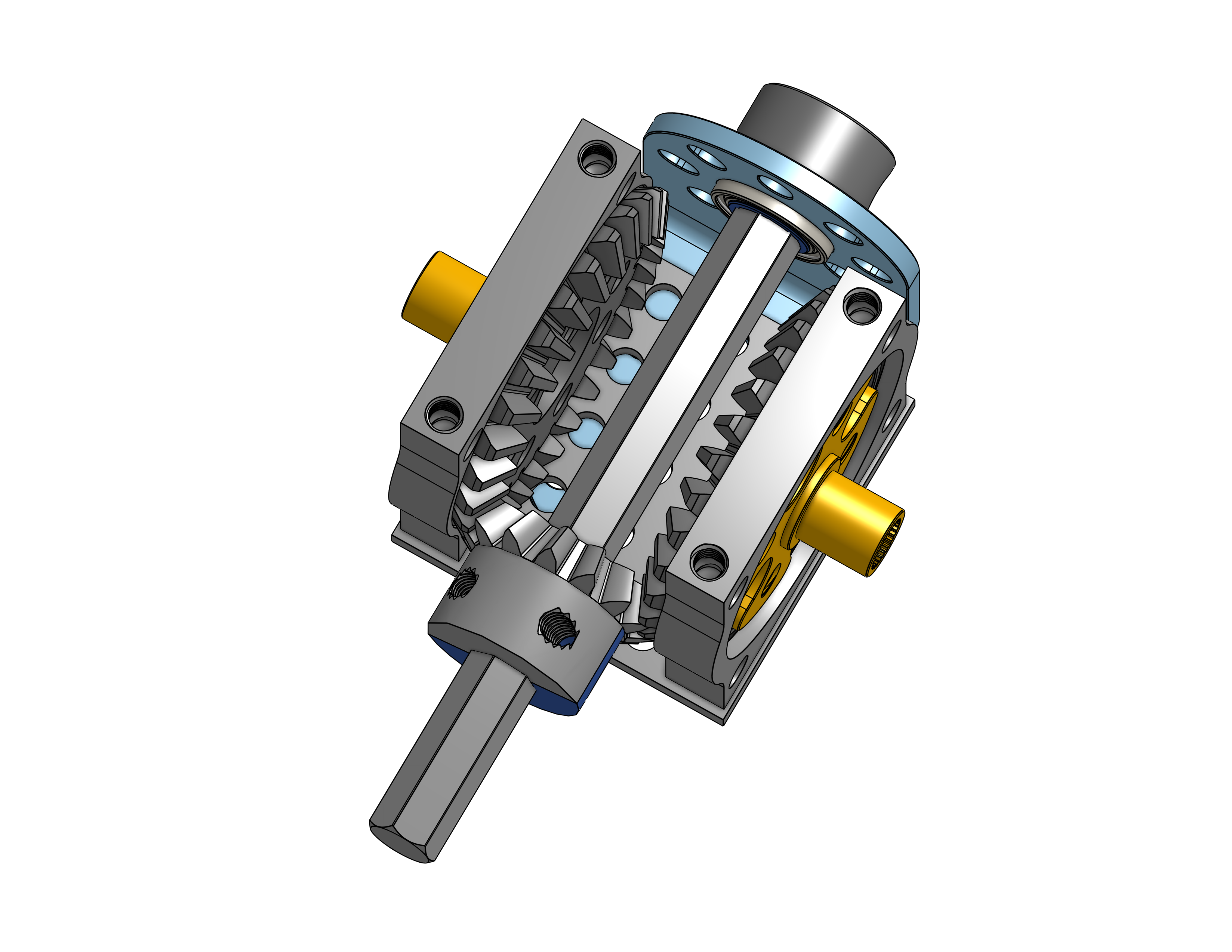
The differential drive is the most important part of the intake. While the claw is a simple, replaceable intake, the differential drive is vital in order to reliably pick up game pieces. Even though a claw can theoretically grab at most angles, differentials allow for manual angle correction. Changing the pitch of the claw is also useful in order to switch between intake and deposit.
Deposit
Pitch
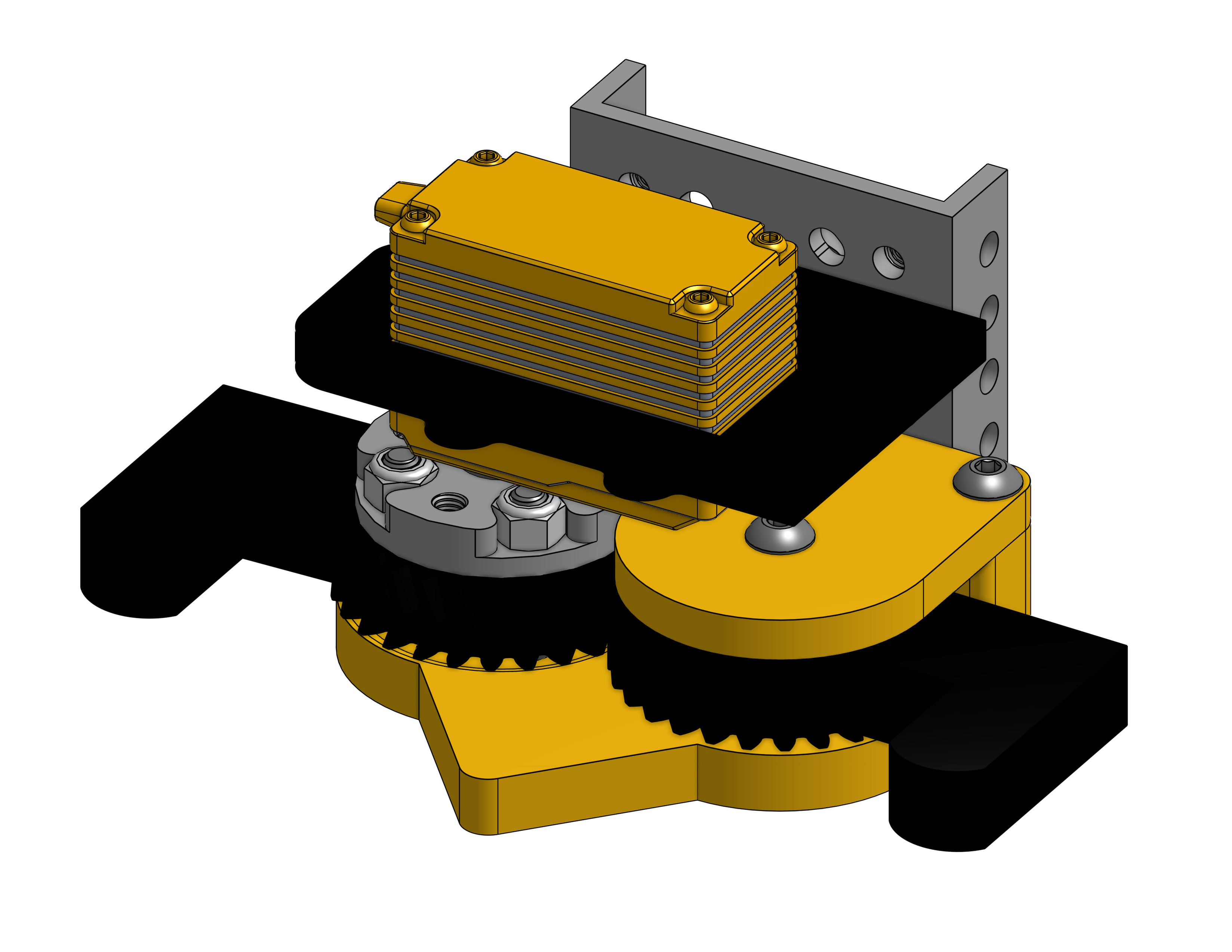
This pitch is controlled by 1 motor with a 1:139 gear ratio in order to maximize torque. The axle, connected to the tube, has a further 1:2 ratio, adding even more torque to the system, giving us seamless control of the pitch. The pitch, controlled by a sprocket and chain, allows for a complete 180 degree movement of the arm. The motor sends power through a chain, limiting skips and increasing consistency.

